

BOSCH REXROTH
R901491916
$14,180.54 USD
- BOSCH REXROTH
- Material:R901491916
- Model:4WRLD16V1-150L-4X/MPT/24ND6T
Quantity in stock: 0
The Bosch Rexroth 4WRLD16V1-150L-4X/MPT/24ND6T (R901491916) is a high-performance industrial hydraulic valve designed to precisely control the direction of oil flow in hydraulic systems. It features a spool valve with pilot operation, internal pilot oil supply and return, and linear spool symbol V. The valve is capable of handling a maximum pressure with an electrical connection conforming to Connector pole PE according to EN standards. It is part of the product group ID and includes a number of ports for subplate mounting. This valve is equipped with electrical actuation that incorporates integrated electronics, adhering to CE conformity and electromagnetic compatibility as per EU directives, including RoHS. The nominal flow rate is specified for this model, and it operates on a supply voltage of VDC. The number of switching positions adds versatility to its application range. In terms of connectivity, this valve offers digital PROFINET RT communication capabilities and uses NBR seals. It can handle various types of hydraulic fluids such as HL, HLP, HLPD, HVLP, HVLPD, and HFC. The 4WRLD16V1-150L-4X/MPT/24ND6T also includes an integrated digital axis control functionality IAC Multi Ethernet which allows for various control modes such as position control, pressure-force control, closed-loop speed control among others. These functionalities are scalable and configurable with analog sensor inputs and inputs for linear position measurement systems like SSI, Vpp or EnDat 2.2. The safety features are noteworthy; it has an internal safety function that can be utilized up to category PL e according to EN standards ensuring reliable performance in critical applications. This model belongs to component series X with a maximum operating pressure bar rating and a maximum flow rate measured in liters per minute while maintaining nominal flow rates within specified limits.
Size 16, symbol V1, electrical with integrated electronics, 24 V DC
Industrial hydraulic valve in the high performance range; reliable control of the oil flow direction according to the hydraulic symbol; high accuracy through internal piston position feedback.
Unpacked Weight: 11.900 kg
General information
The pilot-operated IAC Multi Ethernet valve (Integrated Axis Controller based on directional control valves) is a digital directional control valve with integrated axis controller and the following functionalities:
Position control Pressure/force control Closed-loop speed control Substitutional closed-loop control (position - pressure/force) Substitutional control (flow - pressure/force) pQ function (flow-controlled)
Among others, the following operating modes are possible:
Valve direct control Drive-controlled position control Drive-controlled positioning Positioning block operation The command values are preset via the Ethernet interface (X7E1 or X7E2) or, alternatively, via the analog/digital interface (XH2) The feedback information of the actual value signals to the superior control system is provided optionally either via the Ethernet interface (X7E1 or X7E2) or the analog/digital interface (XH2) The controller parameters are set via the Ethernet interface (X7E1 or X7E2)
Set-up
The directional control valve with IAC Multi Ethernet electronics mainly consists of:
Pilot control valve (1) with control spool and sleeve in servo quality Main stage (2) with centering springs and position feedback Integrated digital axis controller (3) with: analog/digital interface (XH2) Ethernet interfaces (X7E1, X7E2) analog sensor interfaces (X2M1, X2M2) digital sensor interface (X8M) Interface for the position transducer of the main stage (X8A)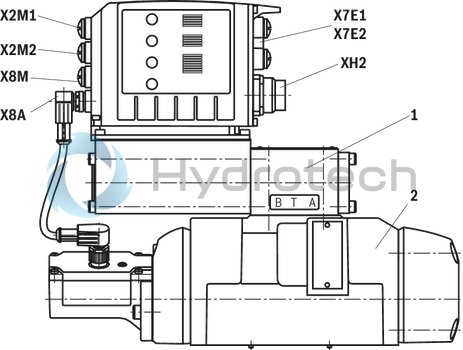
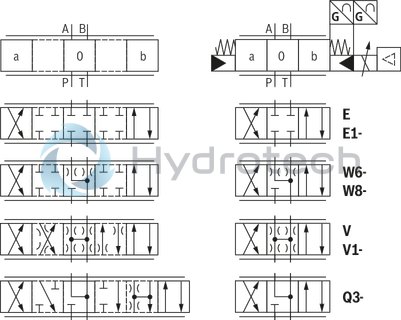
Function (symbol V, V1- and Q3)
When the control solenoid of the pilot control valve is de-energized, its spring-operated control spool is in the “fail safe” position. The control spool of the main valve is in the spring-centered offset position at approx. 6 % of the
stroke in direction P→B/A→T.
The integrated electronics (OBE) compare the specified command value to the position actual value of the control spool of the main stage. In case of a control deviation, the control solenoid of the pilot control valve is activated and its control spool is adjusted.
The flow which is activated via the control cross-sections at the pilot control valve leads to an adjustment of the control spool of the main valve. The stroke/control cross-section of the main valve is regulated proportionally to the command value. In case of a command value presetting of 0 %, the electronics adjust the control spool of the main valve to central position.
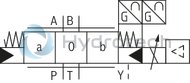
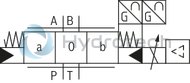
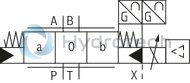
The pilot oil supply in the pilot control valve is either internal via port P or external via port X. The feedback can be internal via port T or external via port Y to the tank.
Switching off the release (symbol V and V1-)
If the supply voltage fails or in case of cable break, the integrated electronics will de-energize the control solenoid, the pilot control spool will move to the fail-safe position and will unload the pilot oil chambers of the main valve. Operated by the spring, the main valve control spool will move to the offset position (approx. 6 % P→B/A→T).
Function (symbol E. and W.)
When the control solenoid of the pilot control valve is de-energized, its spring-operated control spool is in the “fail safe” position. The control spool of the main valve is in spring-centered central position.
The integrated electronics (OBE) compare the specified command value to the position actual value of the control spool of the main stage. In case of a control deviation, the control solenoid of the pilot control valve is activated and its control spool is adjusted.
The flow which is activated via the control cross-sections at the pilot control valve leads to an adjustment of the control spool of the main valve. The stroke/control cross-section of the main valve is regulated proportionally to the command value.
The pilot oil supply in the pilot control valve is either internal via port P or external via port X. The feedback can be internal via port T or external via port Y to the tank.
Switching off the release (symbol E. and W.)
If the supply voltage fails or in case of cable break, the integrated electronics will de-energize the control solenoid, the pilot control spool will move to the fail-safe position and will unload the pilot oil chambers of the main valve. Operated by the spring, the main valve control spool will move to the central position.
Monitoring
The digital control electronics enable comprehensive monitoring functions/error detection including:
Undervoltage Communication error Cable break for analog sensor inputs and digital position measurement system Short-circuit monitoring for analog/digital outputs Monitoring of the microcontroller (watchdog) Temperature of the integrated electronics
IndraWorks DS PC program
To implement the project planning task and to parameterize the IAC Multi Ethernet valves, the user may use the IndraWorks DS engineering tool:
Project planning Parameterization Commissioning Diagnosis Comfortable management of all data on a PC PC operating systems: Windows XP (SP3), Windows 7-10
Notes:
Symbol V and V1-:Pilot-operated 4/3 directional control valves are only functional in the active control loop and do not have a locking basic position when deactivated. Consequently "external isolator valves" are required in many applications and must be taken into account regarding the switch-on/switch-off order.
While the electrical supply voltage is being switched off, the drive may be accelerated for a short time in functional direction P→B. Symbol E. and W.:
Pilot-operated 4/3-directional control valves with positive overlap are functional in controlled or regulated axes. The overlap in the de-energized state is approx. 20 % of the control spool stroke.
While the release is being switched off, the drive may be accelerated for a short time in functional direction P→B. (For further details, please refer to operating instructions 29391-B)
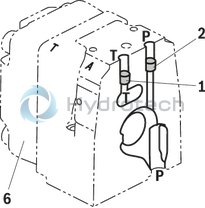
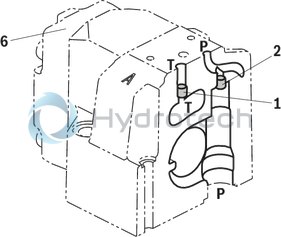
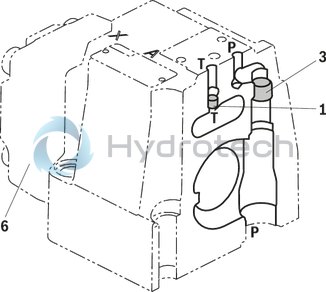
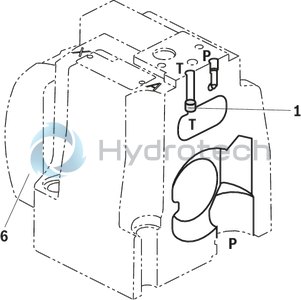
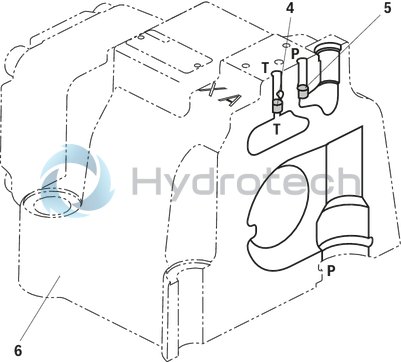
Pilot oil supply (schematic illustration)
Size 10
Size 16
Size 25
Size 27
Size 35
|
1 |
Plug screw M6 according to DIN 906, wrench size 3 - Pilot oil return |
|
2 |
Plug screw M6 according to DIN 906, wrench size 3 - Pilot oil supply |
|
3 |
Plug screw M12x1.5 according to DIN 906, SW6 - Pilot oil supply |
|
4 |
Plug screw 1/16-27 NPTF, wrench size 4 - Pilot oil return |
|
5 |
Plug screw 1/16-27 NPTF, wrench size 4 - Pilot oil supply |
|
6 |
Housing cover main stage (position transducer side) |
|
Pilot oil supply |
|
|
External Internal |
2, 3, 5 closed 2, 3, 5 open |
|
Pilot oil return |
|
|
External Internal |
1, 4 closed 1, 4 open |
Version “XY"
External pilot oil supply, external pilot oil return
In this version, the pilot oil is supplied from a separate control circuit (external). The pilot oil return is not directed into channel T of the main valve, but is separately directed to the tank via port Y (external).
Version “PY”
Internal pilot oil supply, external pilot oil return
With this version, the pilot oil is supplied from channel P of the main valve (internally). The pilot oil return is not directed into channel T of the main valve, but is separately directed to the tank via port Y (external). In the subplate, port X is to be closed.
Version “PT”
Internal pilot oil supply; internal pilot oil return
With this version, the pilot oil is supplied from channel P of the main valve (internally). The pilot oil is directly returned to channel T of the main valve (internally). In the subplate, ports X and Y are to be closed.
Version “XT”
External pilot oil supply, internal pilot oil return
In this version, the pilot oil is supplied from a separate control circuit (external). The pilot oil is directly returned to channel T of the main valve (internally). In the subplate, port Y is to be closed.
| Spool valve |
| Pilot-operated |
| Internal pilot oil supply, internal pilot oil return |
| Linear |
| Component series 4X |
| Maximum flow 4700 l/min |
| Size 10 … 35 |
| Maximum operating pressure 350 bar |
| Rated flow 60 … 1500 l/min |
| Data Sheet | Download Data Sheet |
| Manual | Download Manual |
| Manual | Download Manual |
| Manual | Download Manual |
| Spool symbol | Symbol V1 |
| Max. pressure | 350 |
| Electrical connection description | Connector 12-pole (11 + PE) according to EN 175201-804 |
| Productgroup ID | 9,10,11,12,13,14 |
| Number of ports | 4 |
| Type of actuation | Electrical with integrated electronics |
| Conformity description | CE – electromagnetic compatibility 2014/30/EU RoHS Directive 2011/65/EU |
| Size | 16 |
| Electrical connector | Connector 12-pole (11 + PE) |
| Max. flow | 800 |
| Type of connection | Subplate mounting |
| Connection diagram NFPA | NFPA T3.5.1 R2-2002 D07 |
| Size_CETOP | D07 |
| Nominal flow | 250 |
| Connection diagram | ISO 4401-07-07-0-05 |
| Supply voltage | 24 VDC |
| Number of switching positions | 3 |
| Weight | 11.900 |
| Seals | NBR |
| Connectivity | Digital, PROFINET RT |
| Hydraulic fluid | HL,HLP,HLPD,HVLP,HVLPD,HFC |
| Conformity | CE,RoHS |
|
01 |
02 |
03 |
04 |
05 |
06 |
07 |
08 |
09 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
|||
|
4 |
WRL |
D |
‒ |
4X |
/ |
/ |
24 |
D6 |
* |
|
01 |
4 main ports |
4 |
|
02 |
High-response directional valve, pilot operated |
WRL |
|
03 |
With integrated digital axis controller |
D |
|
04 |
Size 10 |
10 |
|
Size 16 |
16 |
|
|
Size 25 |
25 |
|
|
Size 27 |
27 |
|
|
Size 35 |
35 |
|
|
05 |
Symbols; for the possible version, see "Symbols/Circuit diagrams" |
|
|
Rated flow (Δp = 5 bar) |
||
|
06 |
Size 10 |
|
|
60 l/min (only symbol E, E1-, W6-, W8-, V and V1-) |
60 |
|
|
100 l/min |
100 |
|
|
Size 16 |
||
|
200 l/min (only symbol W6- and W8-) |
200 |
|
|
250 l/min (only symbol E, E1-, V, V1- and Q3-) |
250 |
|
|
Size 25 |
||
|
350 l/min (only symbol W6- and W8-) |
350 1) |
|
|
400 l/min (only symbol E, E1-, V, V1- and Q3-) |
400 |
|
|
Size 27 |
||
|
430 l/min (only symbol W6- and W8-) |
430 1) |
|
|
600 l/min (only symbol E, E1-, V, V1- and Q3-) |
600 |
|
|
Size 35 |
||
|
1000 l/min (only symbol E, E1-, V and V1-) |
1000 |
|
|
1200 l/min (only symbol W6- and W8-) |
1200 1) |
|
|
1500 l/min (only symbol E, E1-, V, V1- and Q3-) |
1500 |
|
|
Flow characteristic |
||
|
07 |
Linear |
L |
|
Linear with fine control range (only NG10; other sizes on request) |
P |
|
|
Progressive with linear fine control range (only symbol Q3-) |
M |
|
|
08 |
Without overlap jump (only symbols V, V1- and Q3-) |
no code |
|
With overlap jump (opening point 5% with covered valve; only symbols E, E1-, W6-, W8-) |
J |
|
|
09 |
Component series 40 … 49 (40 … 49: unchanged installation and mounting dimensions) |
4X |
|
Seal material |
||
|
10 |
NBR seals |
M |
|
FKM seals |
V |
|
|
Observe compatibility of seals with hydraulic fluid used. (Other seals upon request) |
||
|
Pilot oil flow |
||
|
11 |
Pilot oil supply internal, pilot oil return internal |
PT |
|
Internal pilot oil supply, external pilot oil return |
PY |
|
|
External pilot oil supply, internal pilot oil return |
XT |
|
|
External pilot oil supply, external pilot oil return |
XY |
|
|
12 |
Supply voltage 24 V |
24 |
|
Ethernet interface |
||
|
13 |
EtherNet/IP |
E |
|
PROFINET RT |
N |
|
|
Sercos |
S |
|
|
EtherCAT (Profil CANopen) |
T |
|
|
POWERLINK (CANopen profile) |
W |
|
|
VARAN |
V |
|
|
Electrical interface |
||
|
14 |
± 10 VDC or 4 ... 20 mA |
D6 |
|
Sensor interfaces |
||
|
15 |
0 ... 10 V / 4 ... 20 mA / EnDat 2.2 |
S |
|
0 ... 10 V / 4 ... 20 mA / SSI |
T |
|
|
0 ... 10 V / 4 ... 20 mA / 1Vpp |
U |
|
|
16 |
Further details in the plain text |
* |
| 1) | Higher rated flow upon request |
For applications outside these parameters, please consult us!
general
|
Type |
4WRLD | ||||||
|
Size |
10 | 16 | 25 | 27 | 35 | ||
|
Component series |
4X | ||||||
|
Installation position |
any | Any | any | ||||
|
Earth |
kg |
9 | 12 | 19 | 21 | 80 | |
|
Ambient temperature range |
°C |
-20 … +60 | |||||
|
Maximum storage time |
1 year (if the storage conditions are observed; refer to the operating instructions 07600-B) | ||||||
|
Sine test according to DIN EN 60068-2-6 |
10 ... 2000 Hz / maximum 10 g / 10 cycles / 3 axes | ||||||
|
Noise test according to DIN EN 60068-2-64 |
20 ... 2000 Hz / 10 gRMS / 30 g peak / 30 min / 3 axes | ||||||
|
Transport shock according to DIN EN 60068-2-27 |
15 g / 11 ms / 3 axes | ||||||
|
Maximum relative humidity 1) |
% |
95 | |||||
|
Maximum surface temperature 2) |
°C |
120 | |||||
|
MTTFD values according to EN ISO 13849 |
Hydraulic (category 1) |
Years |
75 | ||||
|
Hydraulic and electric (category 3 and 4, without power supply unit) |
Years |
70 | |||||
| 1) | No condensation |
| 2) | Individual operation |
hydraulic
|
Type |
4WRLD | |||||||
|
Size |
10 | 16 | 25 | 27 | 35 | |||
|
Maximum operating pressure |
Port P |
External pilot oil supply |
bar |
350 | 270 | 350 | ||
|
Port A |
bar |
350 | 270 | 350 | ||||
|
Port B |
bar |
350 | 270 | 350 | ||||
|
Port P |
Internal pilot oil supply |
bar |
280 | 270 | 280 | |||
|
Port A |
bar |
280 | 270 | 280 | ||||
|
Port B |
bar |
280 | 270 | 280 | ||||
|
Port T |
bar |
250 | 210 | 250 | ||||
|
Port Y |
bar |
250 | 210 | 250 | ||||
|
Port X |
bar |
280 | 270 | 280 | ||||
|
Minimum pilot pressure |
Pilot control valve |
bar |
10 | |||||
|
Maximum flow |
l/min |
300 | 800 | 1250 | 1850 | 4700 | ||
|
Nominal flow 1) |
l/min |
60 100 |
200 250 |
350 400 |
430 600 |
1000 1200 1500 |
||
|
Maximum leakage flow |
Symbol E, E1- |
Main valve 2) |
l/min |
0.6 | 0.13 | 0.17 | 0.61 | |
|
Main valve + pilot control valve 2) |
l/min |
0.14 | 0.28 | 0.42 | 1.01 | |||
|
Symbol W6-, W8- |
Main valve 2) |
l/min |
0.12 | 0.26 | 0.35 | 1.23 | ||
|
Main valve + pilot control valve |
l/min |
0.2 | 0.41 | < 0.6 | 1.63 | |||
|
Maximum zero flow |
Symbol V, V1- |
Main valve |
l/min |
1.7 | 2.3 | 2.8 | 3.3 | 7.2 |
|
Main valve + pilot control valve 2) |
l/min |
1.85 | 2.6 | 3.2 | 3.7 | 7.65 | ||
|
Pilot flow |
Symbol E 3) |
l/min |
2.4 | 3.5 | 7.5 | 23 | ||
|
Symbol W 3) |
l/min |
2.4 | 3.5 | 7.5 | 23 | |||
|
Symbol V |
l/min |
4.5 3) | 11.5 3) | 22 | 29 | |||
|
Symbol Q3- 3) |
l/min |
4.5 | 11.5 | 22 | 29 | |||
|
Hydraulic fluid |
see table "Hydraulic fluid" | |||||||
|
Hydraulic fluid temperature range |
°C |
-20 … +70 | ||||||
|
Viscosity range |
Maximum admissible |
mm²/s |
20 … 380 | |||||
|
Recommended |
mm²/s |
30 … 45 | ||||||
|
Maximum admissible degree of contamination of the hydraulic fluid, cleanliness class according to ISO 4406 (c) 4) |
Class 18/16/13 according to ISO 4406 (c) | |||||||
|
Hysteresis |
% |
< 0.1 | ≤ 0.1 | |||||
|
Response sensitivity |
% |
< 0.05 | ||||||
|
Range of inversion |
% |
< 0.08 | ||||||
|
Manufacturing tolerance |
% |
≤ 10 | ||||||
|
Switch-off behavior 5) |
Symbol E, E1-, W6-, W8- |
Pilot control valve in “fail-safe” position, main valve moves to spring-centered, overlapped central position | ||||||
|
Symbol V, V1- |
Pilot control valve in “fail-safe” position, main valve moves to spring-centered “offset position” (1 ... 6%, P-B/A-T) | |||||||
|
Symbol Q3- |
Pilot control valve in “fail-safe” position, main valve moves to spring-centered "offset position" (P blocked, A/B to port T open) | |||||||
|
Temperature drift 6) |
%/10° C |
< 0.25 | ||||||
|
Actuating time 7) |
0 ... 100 % |
Symbol E, E1-, W6-, W8- |
ms |
40 | 60 | 90 | ||
| 1) | With Δp = 5 bar/control edge; flow with deviating Δp see formula. |
| 2) | Inlet pressure 100 bar |
| 3) | At port X and Y with stepped input signal from 0 to 100 % (pilot pressure 100 bar) |
| 4) | The cleanliness classes specified for the components must be adhered to in hydraulic systems. Effective filtration prevents faults and simultaneously increases the life cycle of the components. For the selection of the filters, see www.boschrexroth.com/filter. |
| 5) | after electric shut-off |
| 6) | Temperature range 20 °C ... 80 °C |
| 7) | At X = 100 bar |

|
Hydraulic fluid |
Classification |
Suitable sealing materials |
Standards |
Data sheet |
|
|
Mineral oils |
HL, HLP, HLPD, HVLP, HVLPD |
NBR, FKM |
DIN 51524 |
90220 |
|
|
Bio-degradable |
Insoluble in water |
HETG |
NBR, FKM |
ISO 15380 |
90221 |
|
HEES |
FKM |
||||
|
Soluble in water |
HEPG |
FKM |
ISO 15380 |
||
|
Flame-resistant |
Water-free |
HFDU (glycol base) |
FKM |
ISO 12922 |
90222 |
|
HFDU (ester base) |
FKM |
||||
|
HFDR |
FKM |
||||
|
Containing water |
HFC (Fuchs Hydrotherm 46M, Petrofer Ultra Safe 620) |
NBR |
ISO 12922 |
90223 |
|
|
Important information on hydraulic fluids: For further information and data on the use of other hydraulic fluids, please refer to the data sheets above or contact us. There may be limitations regarding the technical valve data (temperature, pressure range, life cycle, maintenance intervals, etc.). The ignition temperature of the hydraulic fluid used must be 40 K higher than the maximum solenoid surface temperature. Flame-resistant – containing water: Maximum operating pressure 210 bar, otherwise increased cavitation erosion Life cycle as compared to operation with mineral oil HL, HLP 30 … 100% Maximum hydraulic fluid temperature 60 °C Bio-degradable and flame-resistant: When using hydraulic fluids that are simultaneously zinc-solving, zinc may accumulate (700 mg zinc per pole tube). |
|||||
electrical, integrated electronics (OBE)
|
Relative duty cycle 1) |
100 % | ||
|
Protection class according to DIN EN 60529 |
IP65 (with mating connector mounted and locked) | ||
|
Power supply |
Nominal voltage 2) |
VDC |
24 |
|
Lower limit value |
VDC |
18 | |
|
Upper limit value |
VDC |
36 | |
|
Maximum admissible residual ripple 3) |
Vpp |
2.5 | |
|
Current consumption |
Maximum 4) |
A |
2.5 |
|
Impulse current |
A |
4 | |
|
Zero point calibration (set in the plant) |
% |
± 1 | |
|
Maximum power consumption |
W |
40 | |
|
AD/DA resolution |
Analog inputs |
bits |
12 |
|
Analog outputs |
bits |
12 | |
|
Required fuse protection |
AT |
4 (time-lag) | |
|
Adjustment |
calibrated in the plant, see "characteristic curves" | ||
|
Conformity |
CE according to EMC directive 2014/30/EU tested according EN 61000-6-2 and EN 61000-6-3 | ||
|
Parameterization interface |
Ethernet | ||
|
Scanning time |
Pressure and force controller (minimum) |
ms |
0.5 |
|
Position controller (minimum) |
ms |
1 | |
|
Booting time |
s |
15 | |
| 1) | Permanent light on/off |
| 2) | Supply voltage is used directly for sensor connections X2M1, X2M2 and X8M (no internal voltage limitation). Voltage limit values must be observed directly at the connector of the valve (observe line length and cable cross-section). |
| 3) | Observe the absolute limit values of the supply voltage. |
| 4) | The maximum current consumption will increase when using the sensor inputs or the switching output according to the external load |
electrical, integrated electronics (OBE)
|
Digital inputs XH2 |
Quantity |
optionally up to 2, configurable (analog inputs are no longer required) |
|
|
Low level |
V |
-3 ... +5 |
|
|
High level |
V |
15 ... UB |
|
|
Current consumption at high level |
mA |
< 1 |
|
|
Reference potential |
Pin 5 |
||
|
Digital outputs XH2 |
Quantity |
1 |
|
|
Low level |
V |
0 ... 3 |
|
|
High level |
V |
15 ... UB |
|
|
Current carrying capacity, max. |
A |
1.5 (short-circuit-proof) |
|
|
Signal delay time |
ms |
< 2 (depending on set scan time) |
|
|
Reference potential |
GND |
||
|
Analog inputs XH2 |
Number (current and voltage input parameterizable) |
optionally up to 2, configurable (digital inputs are no longer required) |
|
|
AD resolution |
bit |
12 |
|
|
Voltage inputs (differential inputs) |
|||
|
Measurement range |
V |
-10 ... +10 |
|
|
Input resistance |
kΩ |
80 + 10 % |
|
|
Temperature drift |
< 14 mV/10 K |
||
|
Current inputs (reference to AGND) |
|||
|
Input current |
mA |
4 ... 20 (0 ... 20 physically) |
|
|
Input resistance |
Ω |
200, measuring resistance plus FET |
|
|
Temperature drift |
< 25 μA/10K |
||
|
Analog outputs XH2 |
Number (current and voltage input parameterizable) |
1 |
|
|
DA resolution |
bit |
14 |
|
|
Voltage outputs |
|||
|
Output range |
V |
-10 ... + 10 (0 ... 10 durch Software) |
|
|
Minimum load impedance |
kΩ |
10 |
|
|
Temperature drift |
< 5 mV/10 K |
||
|
Current outputs |
|||
|
Output range |
mA |
0 ... 20 (4 … 20 by software) |
|
|
Maximum load |
Ω |
200 |
|
|
Analog sensors X2M1, X2M2 |
Number (current and voltage input parameterizable) |
1 pro Stecker |
|
|
Power supply |
V |
24 (corresponding to supply voltage applied to XH2) |
|
|
Maximum supply current |
350 (total X2M1, X2M2, X8M) |
||
|
AD resolution |
bit |
12 |
|
|
Voltage inputs |
|||
|
Measurement range |
V |
0 ... 10 |
|
|
Input resistance |
kΩ |
80 +10 % |
|
|
Temperature drift |
< 15 mV/10 K |
||
|
Current inputs (reference to AGND) |
|||
|
Input current |
mA |
4 ... 20 (0 ... 20 physically) |
|
|
Input resistance |
Ω |
200, measuring resistance plus PTC |
|
|
Temperature drift |
< 10 μA/10 K |
||
|
Digital sensor X8M |
Power supply |
24 V or 5 V |
|
|
Maximum supply current at - 24 V |
mA |
350 (total X2M1, X2M2, X8M) |
|
|
Maximum supply current at - 5 V |
mA |
250 |
|
|
SSI-Aufnehmer |
|||
|
Coding |
Gray |
||
|
Data width |
Bit |
12 ... 28 |
|
|
Transfer frequency |
80 kHz ... 1 MHz |
||
|
Line receiver/driver |
RS485 |
||
|
Endat encoder |
2.2 |
||
|
Line receiver/driver |
RS485 |
||
|
Resolution |
minimum 10 nm and multiple |
||
|
1 Vpp encoder |
|||
|
Transfer frequency |
kHz |
250 |
|
(measured with HLP46, ϑOil = 40 ±5 °C)
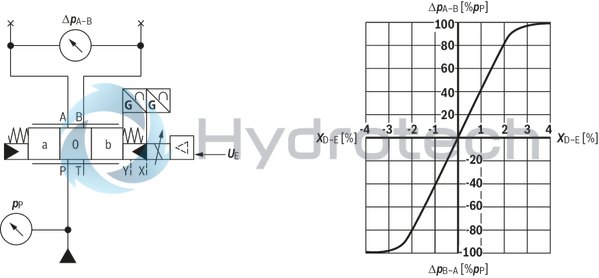
Pressure amplification
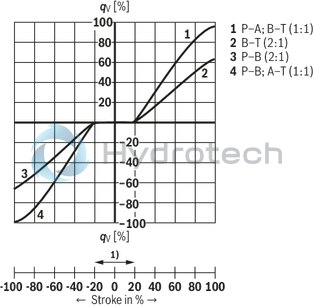
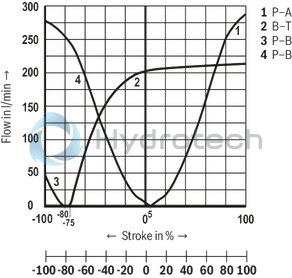
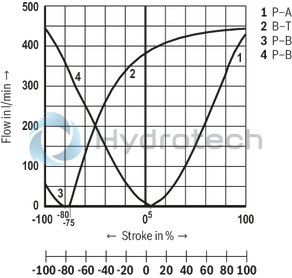
Flow characteristic "L"
Flow/signal function
Symbol V, V1-
| 1) | Step compensation (opening at 5%) |
Flow/signal function
Symbol E, E1-, W6-, W8-
| 1) | Step compensation (opening at 5%) |
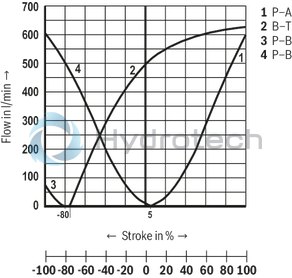
Flow characteristic "P"
Flow/signal function
Symbol V, V1-
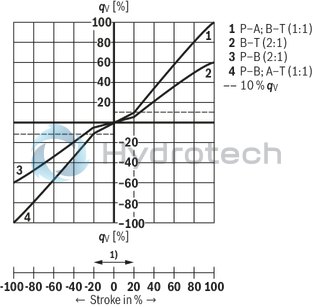
| 1) | Step compensation (opening at 5%) |
Flow/signal function
Symbol E, E1-, W6-, W8-
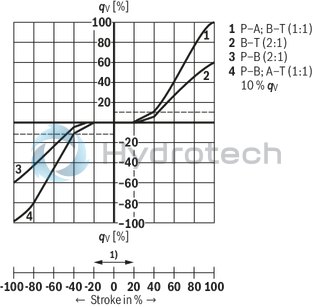
| 1) | Step compensation (opening at 5%) |
Flow characteristic "M"
Symbol Q3, version "100"
Symbol Q3, version "250"
Symbol Q3, version "400"
Symbol Q3, version "600"
Size 10
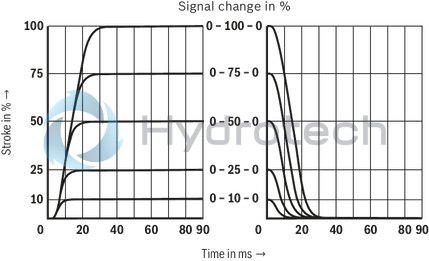
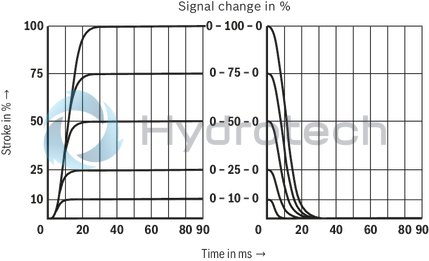
Transition function with stepped electric input signals
Symbols V and Q3-
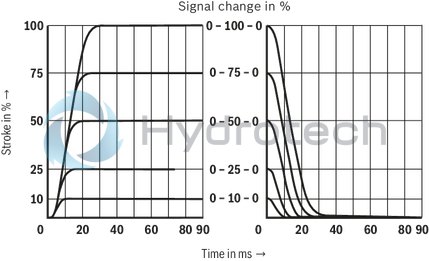 Pilot control valve, port X = 100 bar Main valve, port P = 10 bar
Pilot control valve, port X = 100 bar Main valve, port P = 10 bar
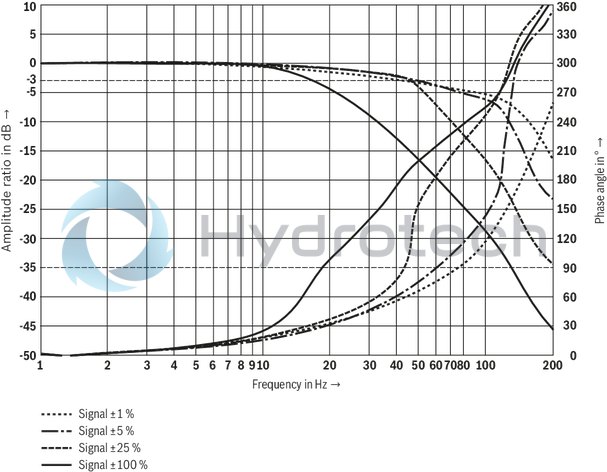
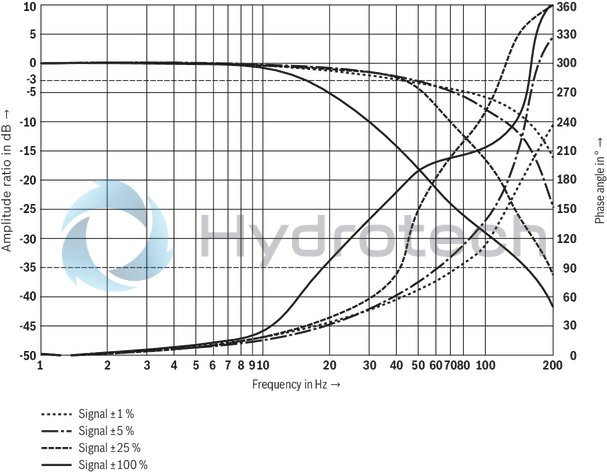
Frequency response
Symbols V and Q3-
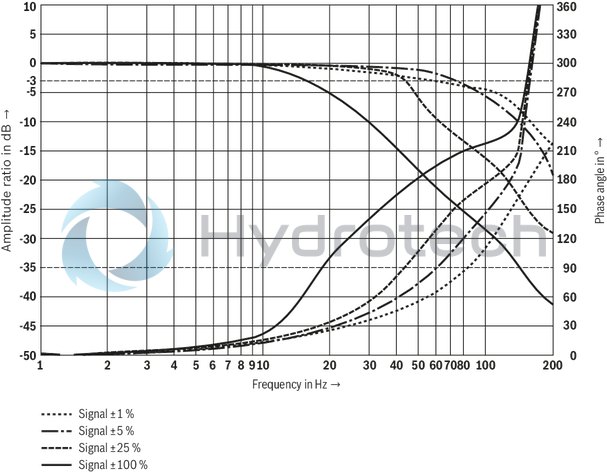
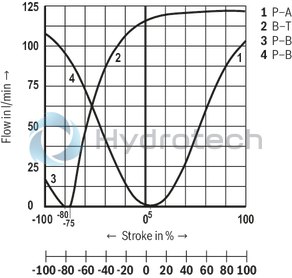
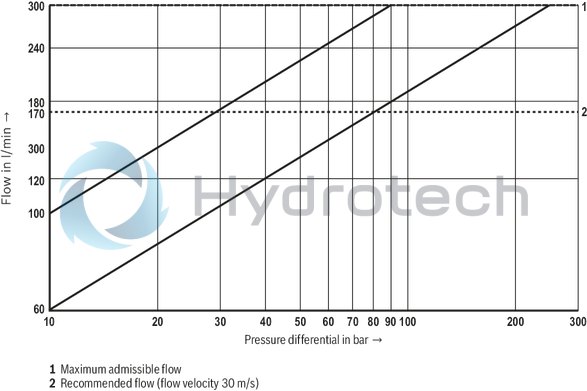
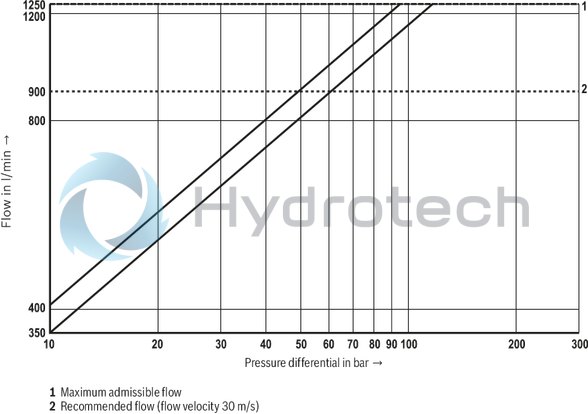
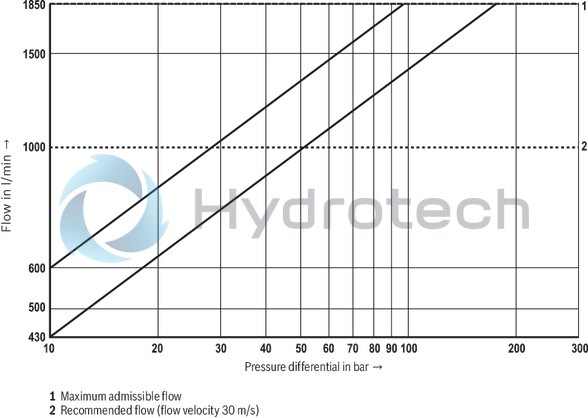
Flow/load function with maximum valve opening (tolerance ±10 %)
Size 16
Pilot control valve, port X = 100 bar Main valve, port P = 10 barFrequency response
Symbol V
Flow/load function with maximum valve opening (tolerance ±10 %)
Size 16
Size 25
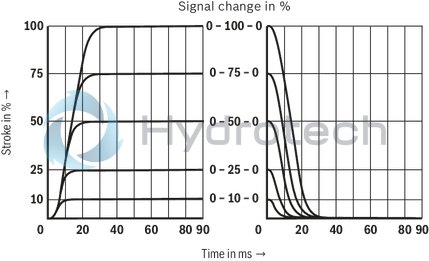
Transition function with stepped electric input signals
Symbol V
 Pilot control valve, port X = 100 bar Main valve, port P = 10 bar
Pilot control valve, port X = 100 bar Main valve, port P = 10 bar
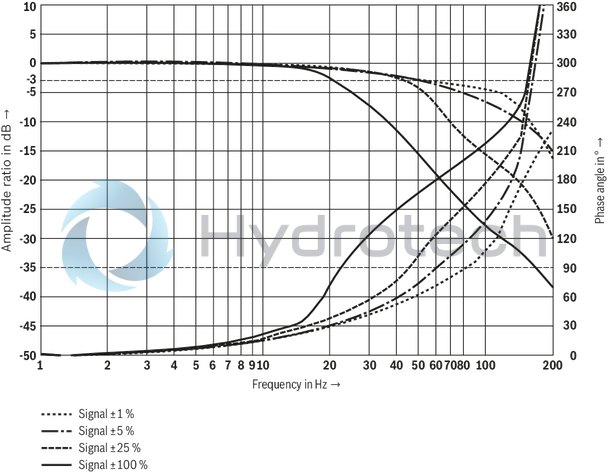
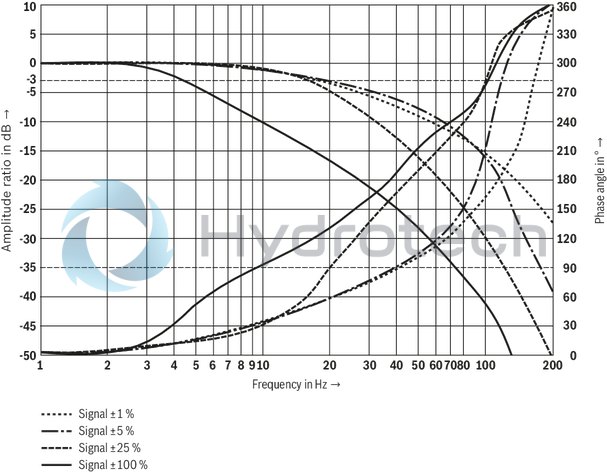
Frequency response
Symbol V
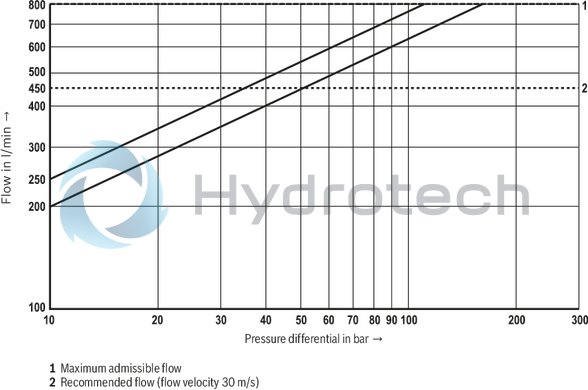
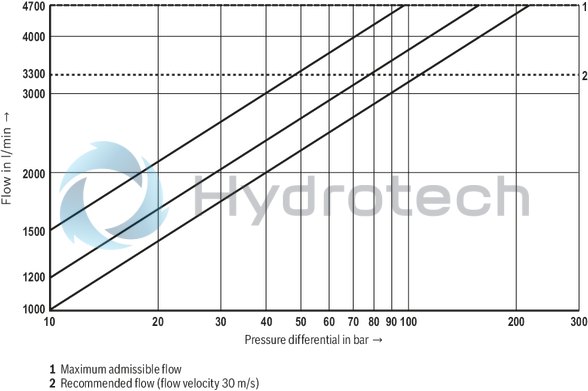
Flow/load function with maximum valve opening (tolerance ±10 %)
Size 27
Transition function with stepped electric input signals
Symbol V
 Pilot control valve, port X = 100 bar Main valve, port P = 10 bar
Pilot control valve, port X = 100 bar Main valve, port P = 10 bar
Frequency response
Symbol V
Flow/load function with maximum valve opening (tolerance ±10 %)
Size 35
Transition function with stepped electric input signals
Symbols V and Q3-
 Pilot control valve, port X = 100 bar Main valve, port P = 10 bar
Pilot control valve, port X = 100 bar Main valve, port P = 10 bar
Frequency response
Symbols V and Q3-
Flow/load function with maximum valve opening (tolerance ±10 %)
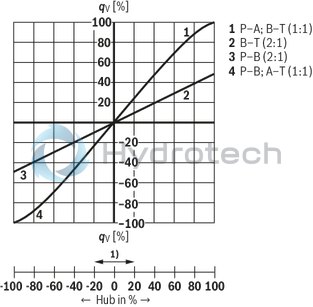
|
Symbol E1-, V1- and W8-: |
|
|
P → A: qv P → B: qv/2 |
B → T: qv/2 A → T: qv |
|
Version |
simple |
Detailed |
|
"XY" |

|

|
|
"PY" |
|
|
|
"PT" |
|
|
|
"XT" |
|
Notice:
Representation according to DIN ISO 1219-1. Hydraulic interim positions are shown by dashes. For information on the "switch-off behavior", refer to the technical data Symbols V and V1 are not suitable for use in safety applications (no overlap).Block diagram / controller function block
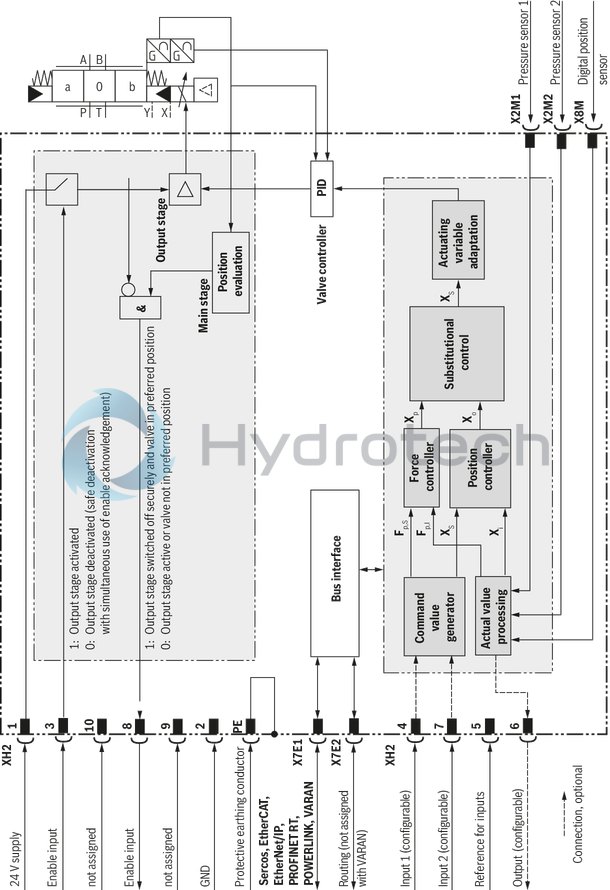
Detailed description of the safety function:
After the signal at the enable input has been removed, the output stage, and thus the solenoid of the valve, are internally separated from the available supply voltage. The enable acknowledgment will only be activated after the safe valve spool position has been achieved.
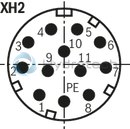
Connector pin assignment XH2, 11-pole + PE according to EN 175201-804
|
Pin |
Core marking 1) |
Assignment of interface D6 |
|
|
Cable, one-part |
Cable, split |
||
|
1 |
1 |
1 |
24 VDC supply voltage |
|
2 |
2 |
2 |
GND |
|
3 |
3 |
white |
Enable input 24 V DC (high ≥ 15 V; low < 2 V) |
|
4 |
4 |
yellow |
Command value 1 (4 ... 20 mA/±10 V) 2) |
|
5 |
5 |
green |
Reference for command values |
|
6 |
6 |
Violet |
Actual value (4 ... 20 mA/±10 V) 2, 3) |
|
7 |
7 |
pink |
Command value 2 (4 ... 20 mA/±10 V) 2) |
|
8 |
8 |
red |
Enable acknowledgement 24 VDC (Imax 50 mA) 4) |
|
9 |
9 |
brown |
not assigned |
|
10 |
10 |
black |
not assigned |
|
11 |
11 |
blue |
Switching output 24 V (normal operation (24 V)/error (0V) or power circuit signal), maximum 1.5 A 4) |
|
PE |
green-yellow |
green-yellow |
Functional ground (directly connected to the valve housing) |
| 1) | Core marking of the connection lines for mating connector with cable set |
| 2) | Selection via commissioning software |
| 3) | For diagnostic purposes, precise actual value response via Ethernet interface |
| 4) | A load increases the current consumption on pin 1 |
Connector pin assignment: M12 x 1, 4-pole, coding D (for Ethernet interface “X7E1” and “X7E2”)
|
Pin |
Assignment |
|
1 |
TxD + |
|
2 |
RxD + |
|
3 |
TxD - |
|
4 |
RxD - |
|
5 |
not assigned |

Analog configurable sensor interfaces, connections "X2M1", "X2M2" (coding A), M12, 5-pole, socket
|
Pin |
Assignment |
|
1 |
+24 V Spannungsausgang (Sensorversorgung) 1, 2) |
|
2 |
Sensorsignal-Eingang Strom (4 ... 20 mA) 3) |
|
3 |
GND |
|
4 |
Sensorsignal-Eingang Spannung (0 ... 10 V) 3) |
|
5 |
negativer Differenzverstärkereingang zu Pin 4 (optional) |
| 1) | Voltage output same as voltage supply connected to input XH2. |
| 2) | A load increases the current consumption of the valve (pin 1 on the connector XH2) |
| 3) | Only one signal input per interface, configurable |

Digital sensor interface SSI, EnDat 2.2 or 1 Vpp measurement system "X8M", M12, 8-pole, socket
|
Pin |
SSI assignment 1) |
EnDat 2.2 assignment 1; 2) |
Assignment 1 Vpp |
|
1 |
GND |
GND |
GND |
|
2 |
+24 V 3) |
+5 V 3) |
+5 V 3) |
|
3 |
Data + |
Data + |
A + |
|
4 |
Data - |
Data - |
A - |
|
5 |
GND |
GND |
B + |
|
6 |
Clock - |
Clock - |
B - |
|
7 |
Clock + |
Clock + |
R + |
|
8 |
+24 V 3) |
+5 V 3) |
R - |
| 1) | Pins 2, 8 and 1, 5 have the same assignment each |
| 2) | Supported resolution ≥ 10 nm |
| 3) | A load increases the current consumption of the valve (pin 1 on the connector XH2) |

Notice:
Reference potential for all signals: GND We recommend connecting the shields on both sides via the mechanical housings of the plug-in connectors.Using connector pins will affect the effectiveness of the shielding effect! Internal screens are not required.
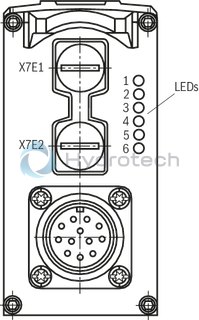
LED displays
|
LED |
Interface |
Sercos |
EtherNet/IP |
EtherCAT |
PROFINET |
POWERLINK |
VARAN |
|
1 |
X7E1 |
Activity |
Activity |
not used |
Activity |
not used |
Activity |
|
2 |
Link |
Link |
Link/Activity |
Link |
Link/Data Activity |
Link |
|
|
3 |
Electronic module |
S |
Network Status |
Network Status |
Network Status |
Status/Error |
Network Status |
|
4 |
Module Status |
Module Status |
Module Status |
Module Status |
Module Status |
Module Status |
|
|
5 |
X7E2 |
Activity |
Activity |
not used |
Activity |
not used |
not used |
|
6 |
Link |
Link |
Link/Activity |
Link |
Link/Data Activity |
not used |
Displays of the Status LEDs
|
Module status LED |
Display status |
Network status LED |
Display status |
|
Off |
No voltage supply |
Off |
No voltage supply |
|
Green-red, flashing |
Initialization |
Green |
Operation |
|
Green, flashing |
Drive ready for operation |
||
|
Green |
Drive active |
||
|
Orange, flashing |
Warning |
||
|
Red, flashing |
Error |
||
Notice:
LEDs 1, 2, 5 and 6 relate to interfaces "X7E1" and "X7E2" Link: Cable plugged in, connection established (permanently lit) Activity: Data sent/received (flashing) Module status LEDs 3 and 4 relate to the electronics module For a detailed description of the diagnosis LEDs, please refer to the functional description Rexroth HydraulicDrive HDxSize 10
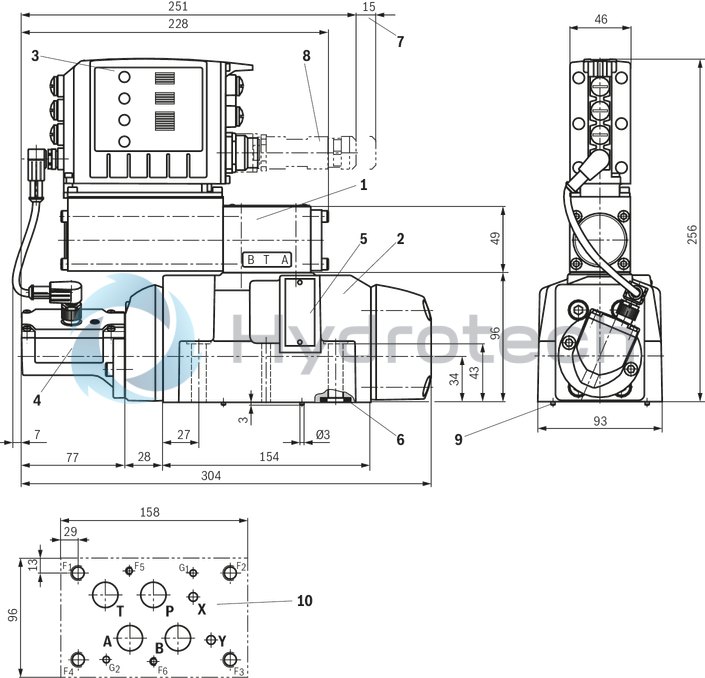
Dimensions in mm

|
|
Required surface quality of the valve contact surface |
|
1 |
Pilot control valve |
|
2 |
Main valve |
|
3 |
Integrated electronics (OBE) |
|
4 |
Inductive position transducer (main valve) |
|
5 |
Name plate |
|
6 |
Identical seal rings for ports A, B, P, and T Identical seal rings for ports X and Y |
|
7 |
Space required to remove the mating connector |
|
8 |
Mating connectors, separate order, see "Accessories" |
|
9 |
Locking pin |
|
10 |
Machined valve contact surface; porting pattern according to ISO 4401-05-05-0-05 |
Notice:
The dimensions are nominal dimensions which are subject to tolerances.
Valve mounting screws (separate order)
|
Size |
Quantity |
Hexagon socket head cap screws |
Material number |
|
10 |
4 |
ISO 4762 - M6 x 45 - 10.9-CM-Fe-ZnNi-5-Cn-T0-H-B Tightening torque MA = 13.5 Nm ±10 % |
R913043777 |
|
or |
|||
|
4 |
ISO 4762 - M6 x 45 - 10.9 Tightening torque MA = 15.5 Nm ±10 % |
Not included in the Rexroth delivery range |
|
Notices:
The tightening torque of the hexagon socket head cap screws refers to the maximum operating pressure. When replacing component series 3X with 4X, only the valve mounting screws listed here may be used. Prior to assembly, check the existing mounting bore on the block for sufficient screw-in depth.Size 16
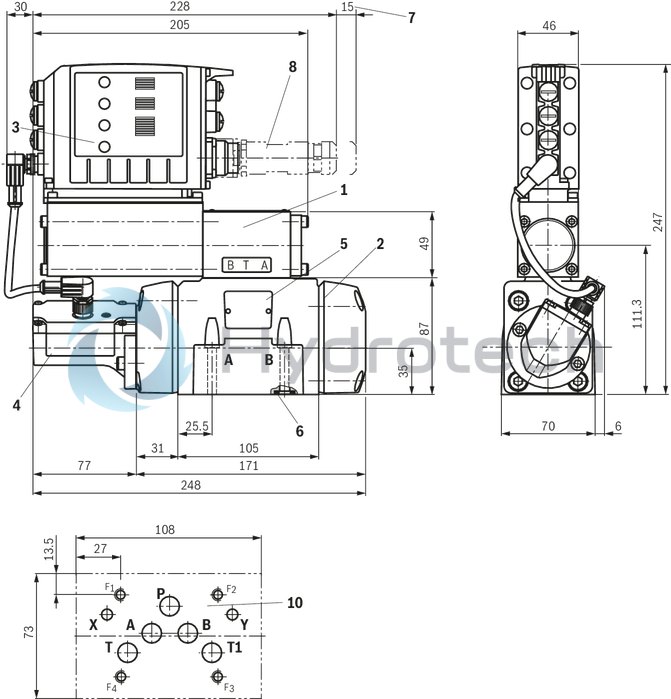
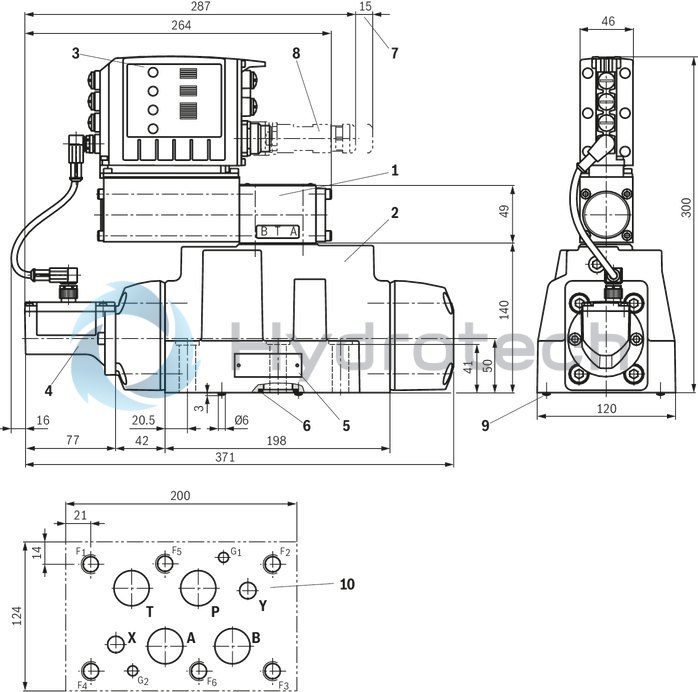
Dimensions in mm
|
|
|
Required surface quality of the valve contact surface |
|
1 |
Pilot control valve |
|
2 |
Main valve |
|
3 |
Integrated electronics (OBE) |
|
4 |
Inductive position transducer (main valve) |
|
5 |
Name plate |
|
6 |
Identical seal rings for ports A, B, P, and T Identical seal rings for ports X and Y |
|
7 |
Space required to remove the mating connector |
|
8 |
Mating connectors, separate order, see "Accessories" |
|
9 |
Locking pin |
|
10 |
Machined valve contact surface; Porting pattern according to ISO 4401-07-07-0-05 |
Notice:
The dimensions are nominal dimensions which are subject to tolerances.
|
Size |
Quantity |
Hexagon socket head cap screws |
Material number |
|
16 |
2 |
ISO 4762 - M6 x 60 - 10.9-flZn-240h-L Tightening torque MA = 12.5 Nm ±10 % |
R913000115 |
|
4 |
ISO 4762 - M10 x 60 - 10.9-flZn-240h-L Tightening torque MA = 58 Nm ±20 % |
R913000116 |
|
|
or |
|||
|
2 |
ISO 4762 - M6 x 60 - 10.9 Tightening torque MA = 15.5 Nm ±10 % |
Not included in the Rexroth delivery range |
|
|
4 |
ISO 4762 - M10 x 60 - 10.9 Tightening torque MA = 75 Nm ±20 % |
||
Notices:
The tightening torque of the hexagon socket head cap screws refers to the maximum operating pressure. When replacing component series 3X with 4X, only the valve mounting screws listed here may be used. Prior to assembly, check the existing mounting bore on the block for sufficient screw-in depth.|
|
|
Required surface quality of the valve contact surface |
|
1 |
Pilot control valve |
|
2 |
Main valve |
|
3 |
Integrated electronics (OBE) |
|
4 |
Inductive position transducer (main valve) |
|
5 |
Name plate |
|
6 |
Identical seal rings for ports A, B, P, and T Identical seal rings for ports X and Y |
|
7 |
Space required to remove the mating connector |
|
8 |
Mating connectors, separate order, see "Accessories" |
|
9 |
Locking pin |
|
10 |
Machined valve contact surface; Porting pattern according to ISO 4401-08-08-0-05 |
Notice:
The dimensions are nominal dimensions which are subject to tolerances.
Valve mounting screws (separate order)
|
Size |
Quantity |
Hexagon socket head cap screws |
Material number |
|
25, 27 |
6 |
ISO 4762 - M12 x 60 - 10.9-10.9-flZn-240h-L Tightening torque MA = 100 Nm ±20 % |
R913000121 |
|
or |
|||
|
6 |
ISO 4762 - M12 x 60 - 10.9 Tightening torque MA = 130 Nm ±20 % |
Not included in the Rexroth delivery range |
|
Notices:
The tightening torque of the hexagon socket head cap screws refers to the maximum operating pressure. When replacing component series 3X with 4X, only the valve mounting screws listed here may be used. Prior to assembly, check the existing mounting bore on the block for sufficient screw-in depth.Size 27
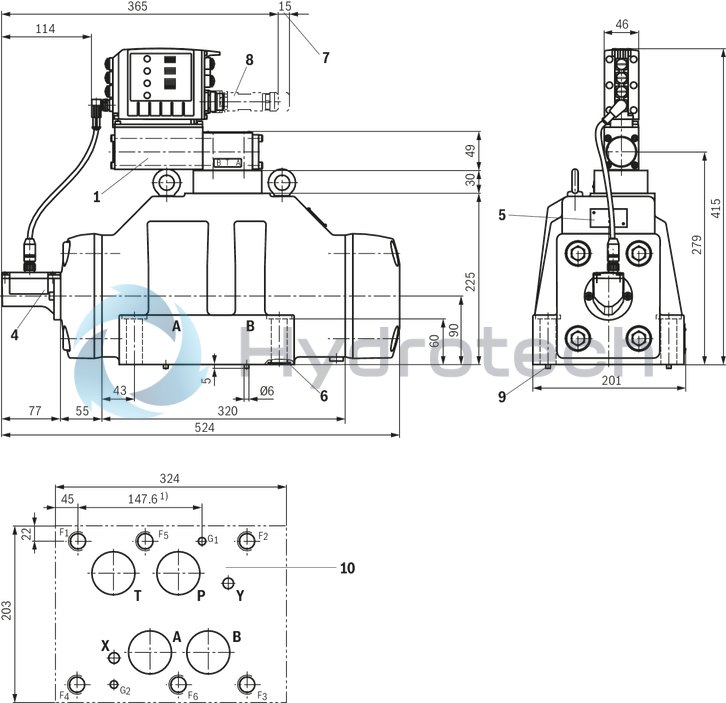
Dimensions in mm
|
|
|
Required surface quality of the valve contact surface |
|
1 |
Pilot control valve |
|
2 |
Main valve |
|
3 |
Integrated electronics (OBE) |
|
4 |
Inductive position transducer (main valve) |
|
5 |
Name plate |
|
6 |
Identical seal rings for ports A, B, P, and T Identical seal rings for ports X and Y |
|
7 |
Space required to remove the mating connector |
|
8 |
Mating connectors, separate order, see "Accessories" |
|
9 |
Locking pin |
|
10 |
Machined valve contact surface; Porting pattern according to ISO 4401-08-08-0-05 |
Notice:
The dimensions are nominal dimensions which are subject to tolerances.
Valve mounting screws (separate order)
|
Size |
Quantity |
Hexagon socket head cap screws |
Material number |
|
25, 27 |
6 |
ISO 4762 - M12 x 60 - 10.9-10.9-flZn-240h-L Tightening torque MA = 100 Nm ±20 % |
R913000121 |
|
or |
|||
|
6 |
ISO 4762 - M12 x 60 - 10.9 Tightening torque MA = 130 Nm ±20 % |
Not included in the Rexroth delivery range |
|
Notices:
The tightening torque of the hexagon socket head cap screws refers to the maximum operating pressure. When replacing component series 3X with 4X, only the valve mounting screws listed here may be used. Prior to assembly, check the existing mounting bore on the block for sufficient screw-in depth.Size 35
Dimensions in mm
|
|
|
Required surface quality of the valve contact surface |
|
1 |
Pilot control valve |
|
2 |
Main valve |
|
3 |
Integrated electronics (OBE) |
|
4 |
Inductive position transducer (main valve) |
|
5 |
Name plate |
|
6 |
Identical seal rings for ports A, B, P, and T Identical seal rings for ports X and Y |
|
7 |
Space required to remove the mating connector |
|
8 |
Mating connectors, separate order, see "Accessories" |
|
9 |
Locking pin |
|
10 |
Machined valve contact surface; Porting pattern according to ISO 4401-10-09-0-05 |
Notice:
The dimensions are nominal dimensions which are subject to tolerances.
Valve mounting screws (separate order)
|
Size |
Quantity |
Hexagon socket head cap screws |
Material number |
|
35 |
6 |
ISO 4762 - M20 x 90 - 10.9-flZn/nc/480h/C Tightening torque MA = 465 Nm ±20 % |
R913009160 |
|
or |
|||
|
6 |
ISO 4762 - M20 x 90 - 10.9 Tightening torque MA = 610 Nm ±20 % |
Not included in the Rexroth delivery range |
|
Notices:
The tightening torque of the hexagon socket head cap screws refers to the maximum operating pressure. When replacing component series 3X with 4X, only the valve mounting screws listed here may be used. Prior to assembly, check the existing mounting bore on the block for sufficient screw-in depth.Transition function with stepped electric input signals
Symbol V
Project planning and maintenance instructions
Connect the valve to the supply voltage only when this is required for the functional sequence of the machine. Do not use electrical signals provided via control electronics (e. g. "No error" signal) for switching safety-relevant machine functions (see also EN ISO 13849 "Safety of machinery – safety-related parts of control systems"). If electro-magnetic interference is to be expected, take appropriate measures ensuring the function (depending on the application, e. g. shielding, filtration). The devices have been tested in the plant and are supplied with default settings. Only complete devices can be repaired. Repaired devices are returned with default settings. User-specific settings will not be applied. The machine end-user will have to re-transfer the corresponding user parameters.Protective cap M12
Material number R901075563

Mating connectors for valves with round connector, 11-pole + PE
12P N11

Mating connectors for valves with round connector, 11-pole + PE
12P N11
For valves with round connector according to EN 175201-804, 11-pole + PEData sheet
Spare parts & repair